Product
态势感知系统
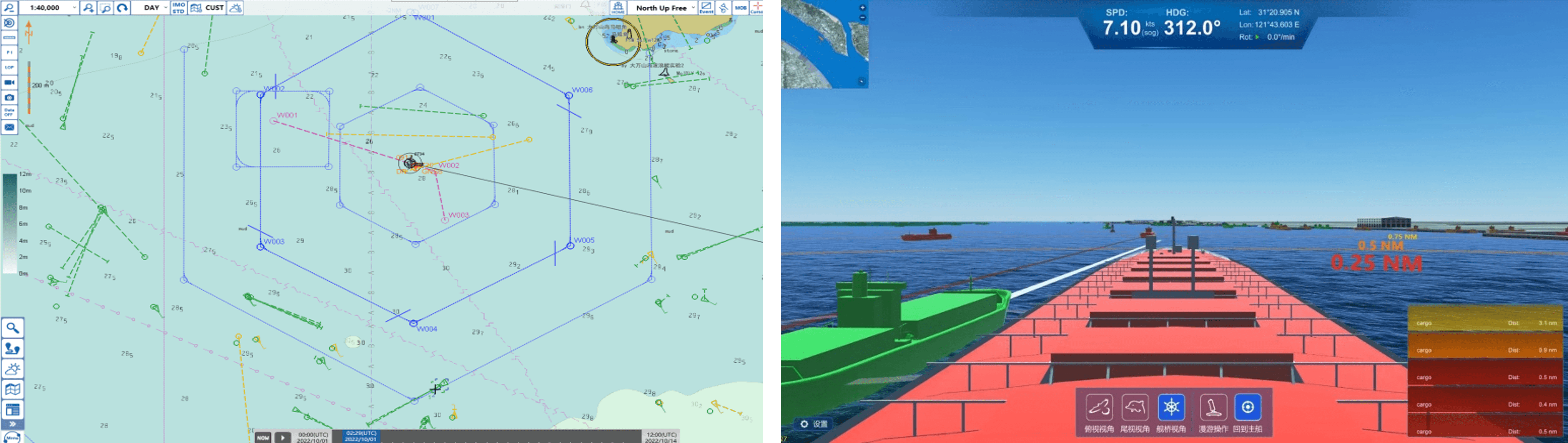
实时环境感知态势图与场景理解能力,让智能船舶和水面无人艇能准确识别水面目标、障碍物,并理解其意图,为自主决策提供依据。
利用多模态融合感知算法,融合视觉、雷达、激光雷达、声纳、AIS、ECDIS等信息,进行目标监测、识别、跟踪;结合IMU、GPS、里程计等,进行高精度定位和姿态解算,评估自身状态;在边缘端部署轻量化深度学习模型进行实时推理,构建SLAM的局部环境建模能力;统一环境建模,将原始数据转化为对自身状态、周边目标、可航行区域(障碍物、航道边界、浅滩等)的结构化认知;构建实时环境感知态势图与场景理解能力,让智能船舶和水面无人艇能准确识别水面目标、障碍物,并理解其意图,为自主决策提供依据。