Product
自主航行系统
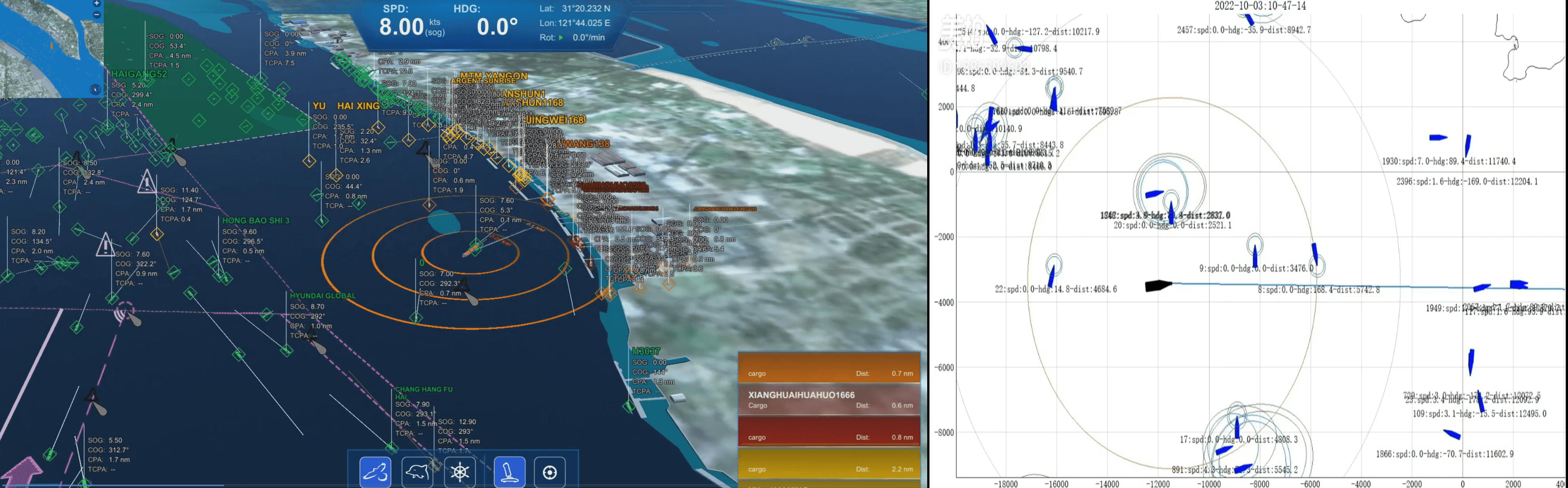
贯通“感知-认知-决策-控制-执行”闭环的自主航行顶层智能框架,实现无人艇(智能船舶)点到点的安全自主航行。
建立一个状态机驱动的自主航行顶层框架,集成态势感知-决策规划-控制执行,管理正常巡航、紧急避碰、安全返航等航行阶段,实现全过程无人干预;设计分层、递进的避碰策略,实时监测碰撞风险,从速度调整到路径重规划,确保主动、平滑、合规地实施避让机动,实现动态避碰;建立系统健康监控与故障树分析机制,能捕获任何异常并妥善处理,在降级策略下,即使传感器失效、通信中断等情况下,也能依据预设的安全规则进行停车或返航;为无人艇(智能船舶)建立一套贯通“感知-认知-决策-控制-执行”闭环的智能框架,实现点到点的安全自主航行。