Product
决策规划系统
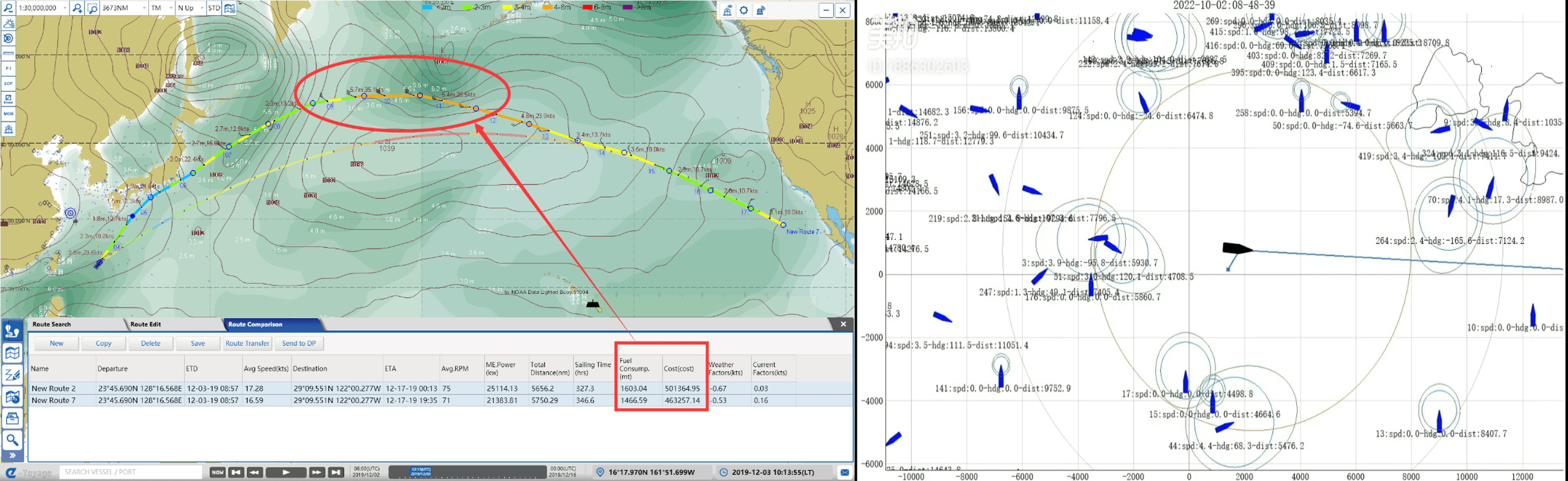
让无人艇能够根据实时态势做出安全、高效、可执行的行为策略,在任务目标、环境约束和自身能力之间做出最优的权衡与选择。
采用分层规划架构,将上层的图搜索算法与下层的局部优化算法相结合,综合电子海图与水文气象信息,根据任务点规划最优参考航线;将国际海上避碰规则(COLREGs)编码为决策状态机或代价函数,利用强化学习在仿真环境中训练复杂场景下的决策模型,让无人艇能够根据实时态势做出符合COLREGs的行为决定(如跟驰、超越、避让);将行为决策转化为一条平滑、动力学可行的时空轨迹;最终生成安全、高效、可执行的行为策略,在任务目标、环境约束和自身能力之间做出最优的权衡与选择。